Robotics Posse

I've expanded this site to include some stuff from some of my friends. While it may appear that we work for LEGO, we don't.
![]()
But, we have had the honor of playing with the new Mindstorms NXT for a while now.
If you want to learn a little more about us, here's a story about a sumo competition we ran in Dec '07.
Other parts of this page are linked to the LEGO web site, because they do a much better job of documenting us, than we can...
 Steve Hassenplug - instigator Team Hassenplug MDP page NXTLog Sumo page |
 Brian Davis Team Possible MDP page NXTLog Sumo page |
 Bryan Bonahoom Team B2 MDP page NXTLog Sumo page |
|

Updated Feb 15, 2010
Made a few changes...

Many people ask about programming software. This table shows different programming languages that can be used for programming or controlling your NXT.
![]()
ICON is software written to program the NXT, using just the NXT. (on brick programming)

Many people ask about sensors. This table shows how different ones work

Brian Davis has some good suggestions for programming in NXT-G... read this

Here's a collection of Blocks, Add-Ins & Tips
More of Brian's software tips. A complete index of NXT-G snippits.

A couple samples of how to gear robots that use NXT motors

Part 1 of Brian's massive write-up on Datalogging
This is an answer to a question that often comes up. Why doesn't my motor move "Unlimited"?

Simple Windows Bluetooth Remote
Pretty early on, I made a pretty simple Windows application, that could control an NXT over Bluetooth. I really haven't done much with it, but someone just asked me about it, so I figured I'd post it.
There aren't many instructions. There is a very narrow button to the left of the "C" motor button. And, another appears between the B & C motors.
Also, there are keyboard commands to run the motors. I think it's Q/A, W/S, & E/D.
{kind=link}
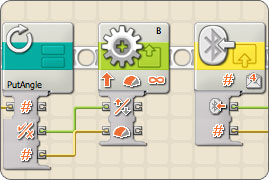
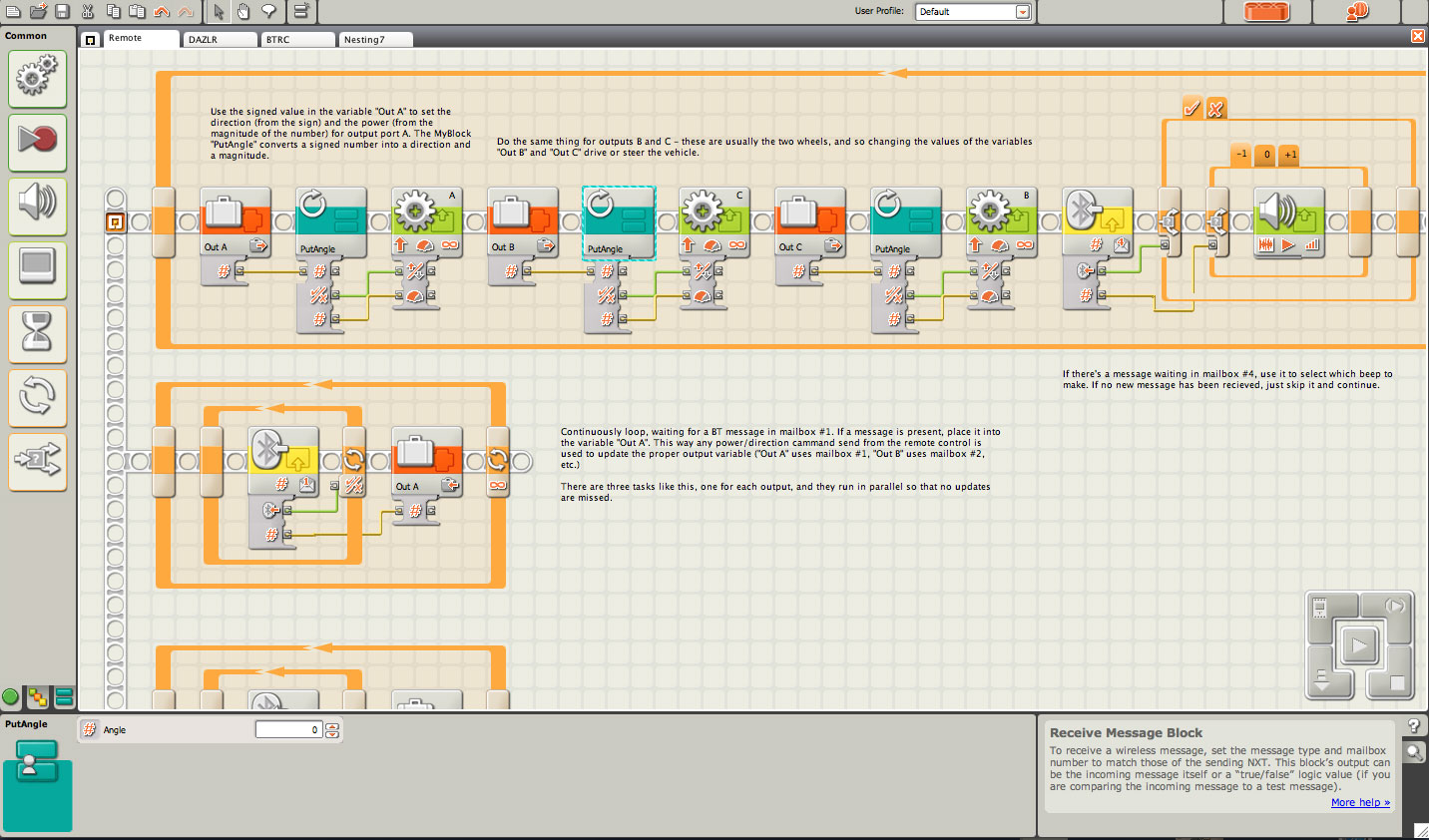
One of the first things both Brian and I did, when we got our second NXT, was play around with Remote Controls. Here's his code, in a zip file. I was going to post them separatly, but if you want one, you really need them all.
"BTRC" that runs on the hand-held unit, and "Remote" (poorly named) that runs on the diff-drive robot. The two MyBlocks are needed by the programs ("GetAngle" & "PutAngle"). The hand-held unit is the BT master.